Exploring Energy Efficiency in Electric Vehicles

The Role of Software and Driving Habits in Energy Conservation
Software's Impact on Driving
Software is now a cornerstone of modern driving, shaping everything from vehicle responsiveness to collision prevention. Today's cars depend on intricate software architectures to manage critical operations like powertrain optimization, stability control, and hazard mitigation. These intelligent systems actively monitor road conditions and can initiate corrective actions faster than human reflexes.
The fusion of software with mechanical components has yielded remarkable gains in operational efficiency. Predictive analytics engines process streams of sensor data to anticipate driving scenarios, while machine learning models continuously refine vehicle behavior. This technological symbiosis is redefining the driver-vehicle relationship.
Autonomous Driving: A Software-Driven Future
Self-driving technology represents perhaps the most profound transportation revolution since the invention of the automobile. The entire operational framework—from route planning to obstacle avoidance—is governed by multilayered software architectures processing millions of data points per second. Early implementations already demonstrate potential to reduce accident rates while optimizing traffic flow.
Creating fail-safe autonomous systems requires software capable of interpreting complex urban environments with near-perfect reliability. Engineers must account for countless variables—from erratic pedestrian behavior to adverse weather conditions—while maintaining sub-second response times across all driving scenarios.
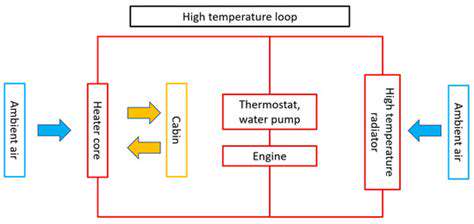
Software in Vehicle Performance Enhancement
Modern engine control units exemplify software's transformative role in automotive engineering. Adaptive algorithms now make microsecond adjustments to combustion parameters, achieving efficiency gains that mechanical systems alone could never realize. These continuous optimizations yield measurable benefits in both performance metrics and environmental impact.
Safety Features Powered by Software
Collision prevention systems demonstrate software's life-saving potential. By fusing data from radar, cameras, and ultrasonic sensors, these systems can detect and mitigate dangerous situations before human operators perceive the threat. Field data shows certain ADAS features have reduced rear-end collisions by over 40% in equipped vehicles.
The next generation of protective systems will incorporate predictive AI models that anticipate hazardous scenarios based on driving patterns, road conditions, and even driver fatigue indicators.
Software and Vehicle Connectivity
The connected vehicle ecosystem enables continuous improvement through over-the-air updates—a paradigm shift from traditional service models. Remote diagnostics now alert drivers to potential issues before they manifest, while cloud-based machine learning allows entire fleets to benefit from individual vehicles' experiences.
The Future of Software-Driven Driving
Emerging neural network architectures promise to overcome current limitations in autonomous decision-making. Next-generation systems will process spatial relationships and behavioral patterns with near-human intuition while maintaining machine precision. These advances may ultimately enable fully autonomous operation in complex urban environments.
Ongoing breakthroughs in neuromorphic computing could yield processing architectures specifically optimized for real-time driving scenarios. Such specialized hardware-software integration may prove crucial for achieving the reliability standards required for widespread autonomous adoption.
Ethical Considerations and Software in Driving
The programming of autonomous decision matrices raises profound philosophical questions. How should vehicles prioritize occupant safety versus pedestrian protection in unavoidable collision scenarios? What constitutes appropriate risk assessment in ambiguous situations?
Regulatory bodies face the challenge of establishing safety benchmarks that encourage innovation while ensuring public protection. These standards must evolve alongside the technology itself, requiring unprecedented collaboration between engineers, ethicists, and policymakers.
Read more about Exploring Energy Efficiency in Electric Vehicles







Hot Recommendations
- Offshore Wind for Industrial Power
- Agrivoltaics: Dual Land Use with Solar Energy Advancements: Sustainable Farming
- Hydrogen as an Energy Storage Medium: Production, Conversion, and Usage
- Utility Scale Battery Storage: Successful Project Case Studies
- The Role of Energy Storage in Grid Peak Shaving
- The Role of Startups in Renewable Energy
- The Role of Blockchain in Decentralization of Energy Generation
- The Future of Wind Energy Advancements in Design
- Synchronous Condensers and Grid Inertia in a Renewable Energy Grid
- Corporate Renewable Procurement for Government Agencies